
Управление двигателем нельзя рассматривать в отрыве от управления автомобилем. Скоростные и нагрузочные режимы работы двигателя зависят от скоростных режимов движения автомобиля в различных условиях эксплуатации, которые включают в себя разгоны и замедления, движения с относительно постоянной скоростью, остановки.
Водитель, воздействуя на дроссельную заслонку, изменяет скоростной и нагрузочный режимы двигателя. Выходные характеристики двигателя при этом зависят от состава топливовоздушной смеси и угла опережения зажигания, управление которым обычно осуществляется автоматическими системами (рис. 1).
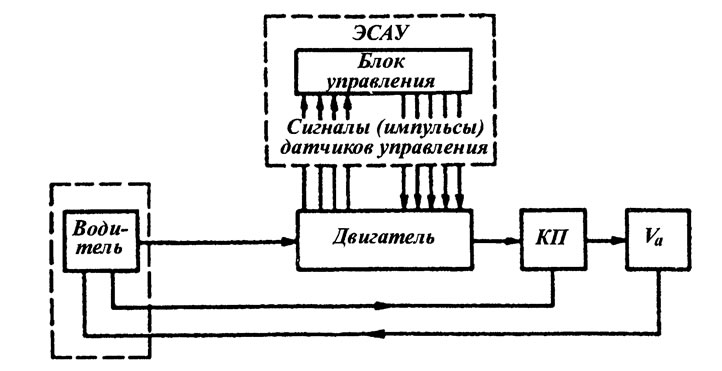
Рис. 1. Схема управления автомобильным двигателем: ЭСАУ - электронная система автоматического управления; КП - коробка передач; Va - скорость движения автомобиля
Схема двигателя как объекта автоматического управления приведена на рис. 2.
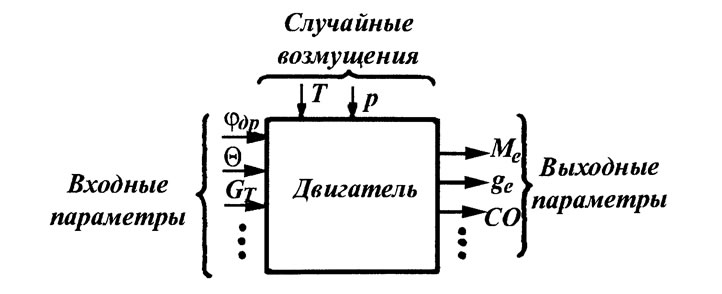
Рис. 2. Схема двигателя как объекта управления
Входные параметры (угол открытия дроссельной заслонки φдр, угол опережения зажигания θ, цикловой расход топлива Gт и другие) - это те параметры, которые влияют на протекание рабочего цикла двигателя. Их значения определяются внешними воздействиями на двигатель со стороны водителя или системы автоматического управления, поэтому они называются также управляющими.
Выходные параметры, которые называются управляемыми, характеризуют состояние двигателя в рабочем режиме. К ним относятся: частота вращения коленчатого вала n, вращающий момент Ме, показатель топливной экономичности ge и токсичность отработавших газов (например, содержание СО), а также многие другие.
Кроме входных управляющих параметров на двигатель во время его работы воздействуют случайные возмущения, которые мешают управлению. К случайным возмущениям можно отнести изменение параметров состояния внешней среды (температура Т, давление окружающей среды р, влажность), свойств топлива и масла и т.д.
Для двигателя внутреннего сгорания характерна периодическая повторяемость рабочих циклов. Как объект управления двигатель считается нелинейным, так как реакция на сумму любых внешних воздействий не равна сумме реакций на каждое из воздействий в отдельности. Учитывая, что двигатель в условиях городской езды работает на нестационарных режимах, возникает проблема оптимального управления им. Возможность оптимального управления двигателем на нестационарных режимах появилась с развитием электронных систем управления.
Из-за сложности конструкции, наличия допусков на размеры деталей двигатели одной и той же модели имеют различные характеристики. Кроме того, по конструктивным параметрам (степень сжатия, геометрия впускного и выпускного трубопроводов и т.д.) отличаются и отдельные цилиндры многоцилиндрового двигателя.
Автомобильный двигатель представляет собой многомерный объект управления, так как число входных параметров у него больше одного и каждый входной параметр воздействует на два и более выходных. В таком случае система управления также должна быть многомерной.
Чрезвычайно широкое распространение автомобильных двигателей предопределило и большое разнообразие их конструкций. Естественно, это приводит к многовариантности систем управления. Так, если в карбюраторных системах топливоподачи практически не используется электроника, то современные системы впрыскивания топлива создаются только на основе управления электронными системами.
С другой стороны, развитие электронных систем управления может стимулировать появление новых конструктивных решений проектируемых двигателей.
Экономичность двигателя может быть значительно повышена благодаря электронному управлению его системой тепливоподачи. Система электронного впрыскивания позволяет обеспечить строго дозированную подачу топлива в зависимости от режима работы двигателя. Перспективным является совмещение электронного управления впрыскиванием топлива и зажиганием. Широко распространена система автоматического управления экономайзером принудительного холостого хода (САУ ЭПХХ).